
作者:电子创新网张国斌
“上次我到伦敦去,他们说弄个机器人到台上,我说:不要跟我握手,更不要拥抱我。后来发现这个机器人背后有五个人在服务,说有可能万一这个机器人倒下了,派一个真人上来继续对话。”这是芯原股份董事长、首席执行官、总裁戴伟民在今天召开的芯原具身机器人专题技术研讨会上的开篇致辞。

他的致辞说明了什么问题?说明现在的机器人还没到爆发阶段,甚至机器人不仅不会干活,还不会“让人安心”。戴伟民讲得很直接:“冷冰冰、不可信、甚至让人害怕,特别是在养老场景:不是‘能不能做’,而是‘敢不敢用’。”
过去一年,你看到的机器人打太极、跳舞、走秀,本质上都是一件事:“训练好的表演”,而不是“真正的智能”。用自动驾驶类比更残酷:今天的人形机器人,大概只在L2阶段——能做动作,但无法在复杂环境中独立决策。

问题出在哪?不是算力,不是模型。而是一个被整个行业低估的核心--现实世界的数据。

戴伟民指出:大模型已经解决了“读万卷书”——可以预测语言、理解文本。但机器人需要的是“行万里路”:在不确定的物理世界里,实时感知、判断、执行。

“现在AI Transformer可以猜出下一段单词,当然你把书读完了、当然可以猜下一段单词。医学的指南读了、论文读了,这就叫语言类读万卷书!行万里路就是感知,还有一句话“行万里路,不如阅人无数”,例如:目前在情感场景感知就差远了。我们走到一个陌生环境要先搜集、采集数据,比如你戴一幅眼镜,每天收集、这才是真正创造数据的地方。以后AI收集不仅收集外面的,也收集你的感知信息。”他强调。
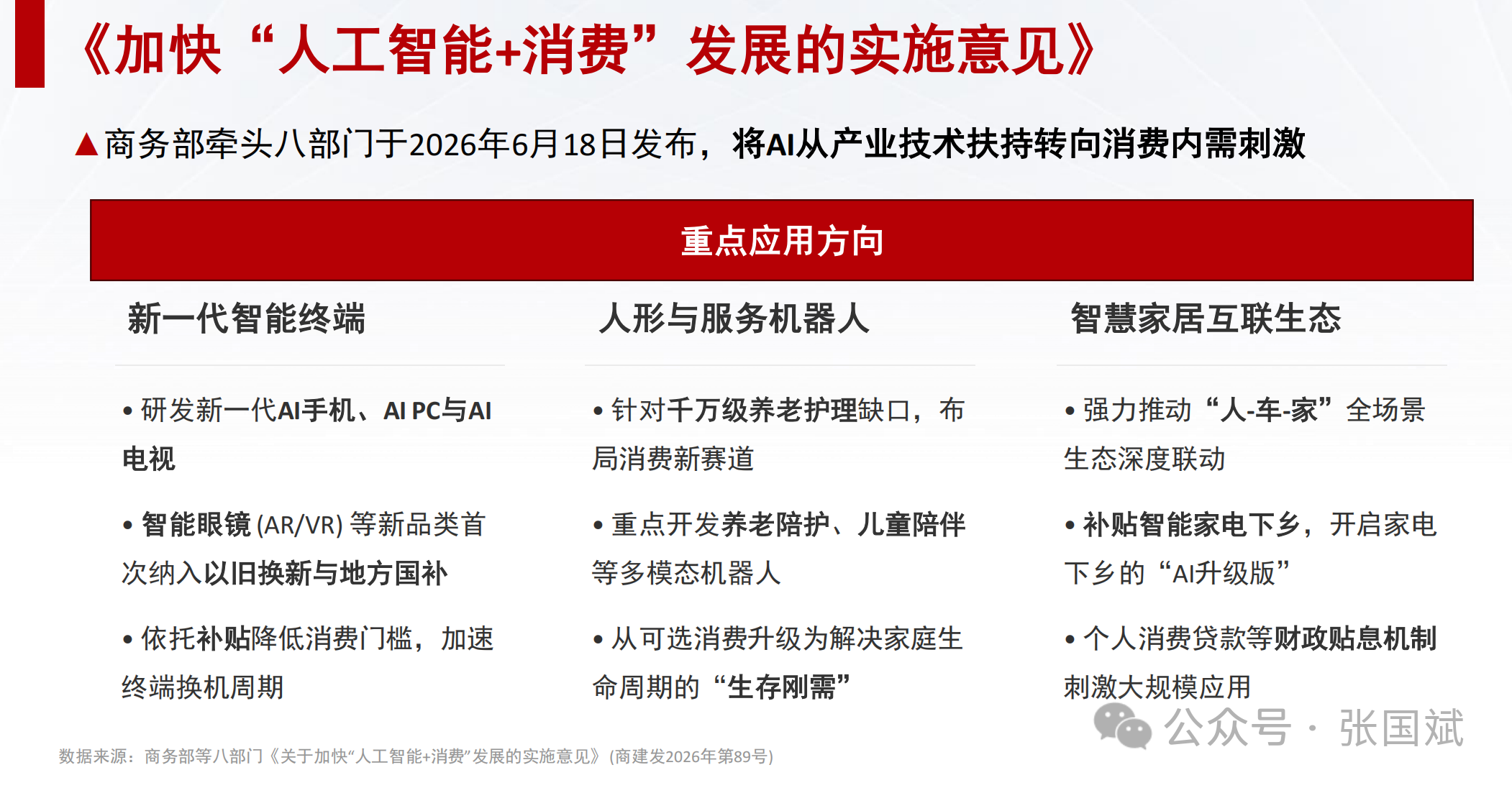
戴伟民表示2026年6月18日,政策发生了一个重大转向:AI:从“产业扶持” → “消费刺激”,重点方向非常清晰:AI眼镜(可能进入补贴名单)、智能家电下乡、人形机器人(养老场景)。
这背后其实是一个更深层逻辑:中国在做一件事:用消费市场,反向拉动AI数据与应用闭环。
为什么关键?因为具身智能最大瓶颈不是算法,而是:真实世界数据的规模与密度,谁能掌握“连续、真实、低成本”的数据流,谁就定义下一代AI。
戴伟民特别提到一个细节:在去年的AI眼镜技术研讨会上,行业争论要不要显示?要不要摄像头?而现在趋势已经开始收敛:Google:无显示 + 有摄像头;Apple(传闻):同样路径,这意味着什么?意味着AI眼镜正在从“显示设备”转向“感知设备”,其本质角色是:
✔ 人类第一视角数据采集器
✔ 行为数据记录器
✔ 物理世界标签生成器
一句话总结:谁控制眼镜,谁就控制未来机器人训练数据。
基于戴伟民这段发言,我们可以提炼出三个关键判断:
1)机器人短期不会爆发(但长期确定性极高)
技术仍在L2、数据体系未建立、安全与信任未解决;
2)AI眼镜将先于机器人爆发
不是因为它更炫,而是因为它:能提供“机器人所需的数据”;
3)真正的竞争,不是模型,而是“数据入口 + 系统能力”
未来赢家不是最强模型公司而是控制数据、芯片、系统三位一体的玩家,所以,如果说:GPU定义了训练时代。大模型定义了语言智能,那么接下来:谁来定义“物理世界智能”?答案正在从机器人本体转向AI眼镜 + 数据系统 + ASIC平台,而芯原,正试图卡在这个体系的“中枢位置”。
所以马斯克那句话才值得警惕:“中国将成为人形机器人最大竞争对手。”不是因为机器人做得最好,而是因为中国,正在构建一个“训练机器人”的世界。
对此,大家怎么看?欢迎留言讨论!
注:本文为原创文章,未经作者授权严禁转载或部分摘录切割使用,否则我们将保留侵权追诉的权利